기술개요
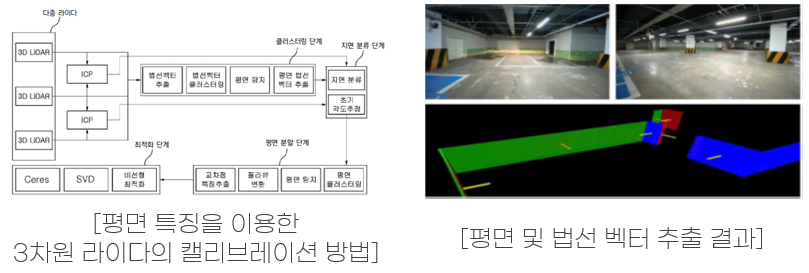
- 별도의 인공 마커 없이 주기적으로 외부 파라미터를 추정할 수 있는 3차원 라이다의 캘리브레이션 방법
- 소프트웨어는 알고리즘으로 구성되며 3차원 라이다의 캘리브레이션 수행 방법 시스템, 수행 장치의 제어부 또는 프로세서에서 실행할 수 있음
기술개발배경
- 물체의 날카로운 모서리에서 LiDAR 센서 측정의 정확도가 낮음
- 기존 인공 마커를 기반으로 한 보정 방법은 유지 관리 측면에서 비효율적임
ㆍ 자율주행차량에 설치된 카메라와 LiDAR 센서의 외부 파라미터를 추정하는 연구는 오랫동안 진행되어 왔음
- 차량에 장착된 다중 LiDAR는 내/외부 파라미터에 대해 정확하게 캘리브레이션 하는 것이 중요
기술의 특장점 및 차별성
- 평면 법선 벡터를 이용하여 GPC(Ground Point Cloud)와 OPC(Object Point Cloud)로 지면을 분리하고, 각 라이다의 초기 각도 추정 가능
- OPC 세트를 클러스터링하여 최종 평면과 CFP(Cross Feature Point)를 추출 할 수 있음
- 추출된 CFP를 이용하여 비선형 제곱 함수를 설정하고, 이를 통해 로테이션 및 트랜슬레이션(translation)을 포함하는 파라미터 산출 가능
적용 분야
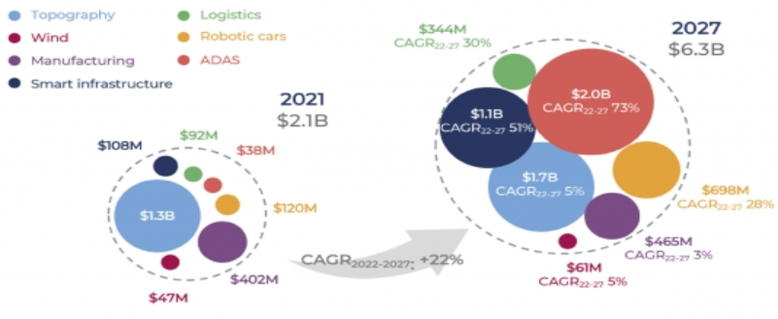
시장 전망
- (국내) 국내 자율주행차 센서 시장은 2021년 8,063억원에서 2027년 27,786억원으로 증가할 전망(CAGR 22.9%)
- (해외) 글로벌 라이다 시장은 2021년 21억달러에서 2027년 63억 달러로 증가할 전망(CAGR 22%)