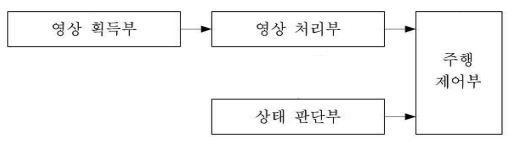
기술개요
- 실내 환경 데이터의 코너라인을 취득하여 간편하게 처리할 수 있음.
- 불필요한 데이터를 제거하여 실내 코너라인을 빠르게 추출함.
- 코너라인의 정보로 강인한 소실점 데이터를 얻어 정확하게 이동 로봇을 주행하도록 하는 방법 및 장치.
기술개발현황
- 대표적으로 레이저 스캐너를 이용한 이동 로봇의 위치 및 주행을 실시하는 연구가 진행됨.
- 천장영상을 이용한 특징 패턴, 이동 로봇의 위치와 방향성 등을 인지하는 연구들이 진행됨.
- 기존 레이저 스캐너 기술의 경우 고가의 레이저 스캐너, 시스템을 구성하는데 준비가 필요하며, 넓은 공간일 경우 부가적인 인공 표식 설치가 필요하고 부가적인 비용이 많이 발생함.
- 천장영상을 이용한 연구의 경우 영상 인식을 위한 특징패턴이 필요하고 영상 추출까지 많은 시간이 소모됨.
기술효과
- 코너 라인의 데이터를 이용한 이동 로봇의 복도 주행 방법을 제공하여 기존 주행 방법보다 정교하고 정확한 복도주행이 가능함.
기술의 차별성 및 우수성
- 기존의 일정 패턴을 인식하여 주행을 하는 방법보다 어디서나 쉽게 찾을 수 있는 코너라인의 소실점 데이터를 토대로 PID 제어를 통해 이동 로봇의 자세를 제어하여 주행 중의 주행오차를 최소화.
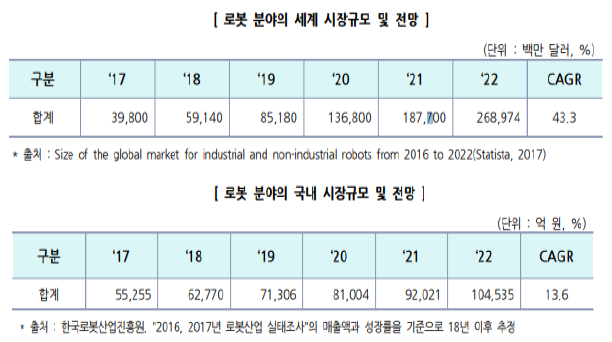
시장동향
- 세계 로봇 시장 규모는 2017년 398억 달러에서 연평균 43.3 %씩 증가하여 2022년 2,690억 달러에 도달할 전망.
- 국내 로봇 시장 규모는 2016년 4조 5,972억 원에서 연평균 10.5 %씩 증가하여 2021년 7조 5,618억 원에 다다를 전망.