기술개요
본 기술은 RGB-D 이미지(컬러 + 깊이 정보)를 기반으로 이동체의 위치를 추정하고 지도를 작성하는 SLAM 알고리즘임.
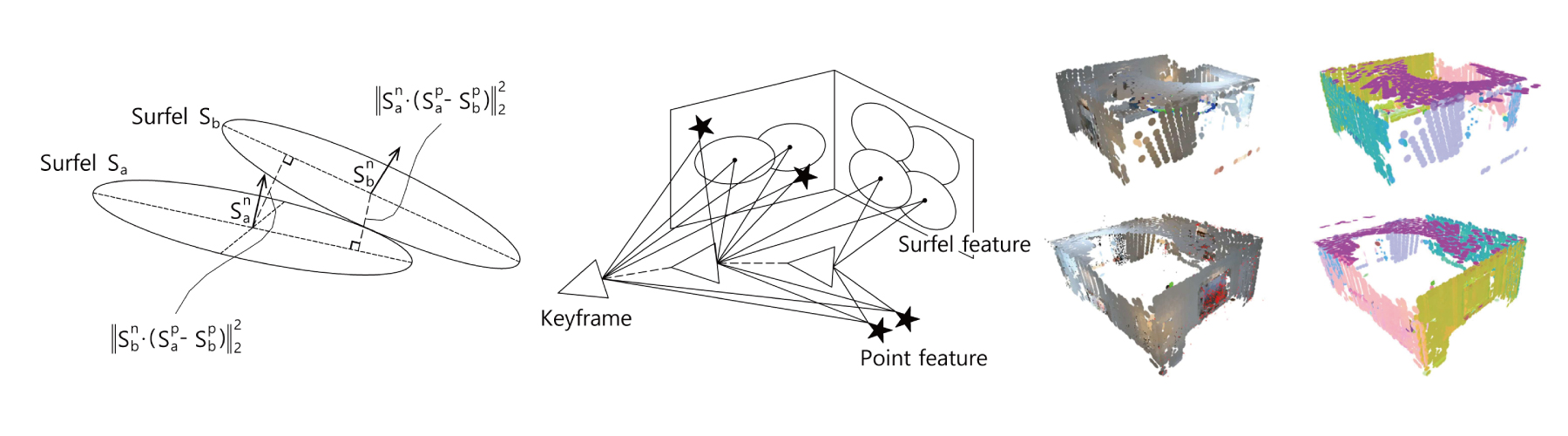
기존에는 패턴이 적거나 특징점이 부족한 환경에서 SLAM 정확도가 떨어지는 문제가 있었으며, 본 기술은 특징점(point feature)과 서펠(surfel, surface element)을 융합하여 정밀한 위치 추정과 지도 작성을 가능하게 함.
- RGB-D 센서로 얻은 이미지에서 특징점과 서펠을 추출
- 키프레임 생성 여부를 판단하고 지도 작성 그래프에 추가
- 기존 랜드마크와 매칭되지 않는 요소들을 새롭게 반영
- 지역/전역 최적화 및 루프 클로징 수행
기술 구현 내용
1) 입력 데이터
- RGB-D 이미지 프레임 (컬러 + 깊이)
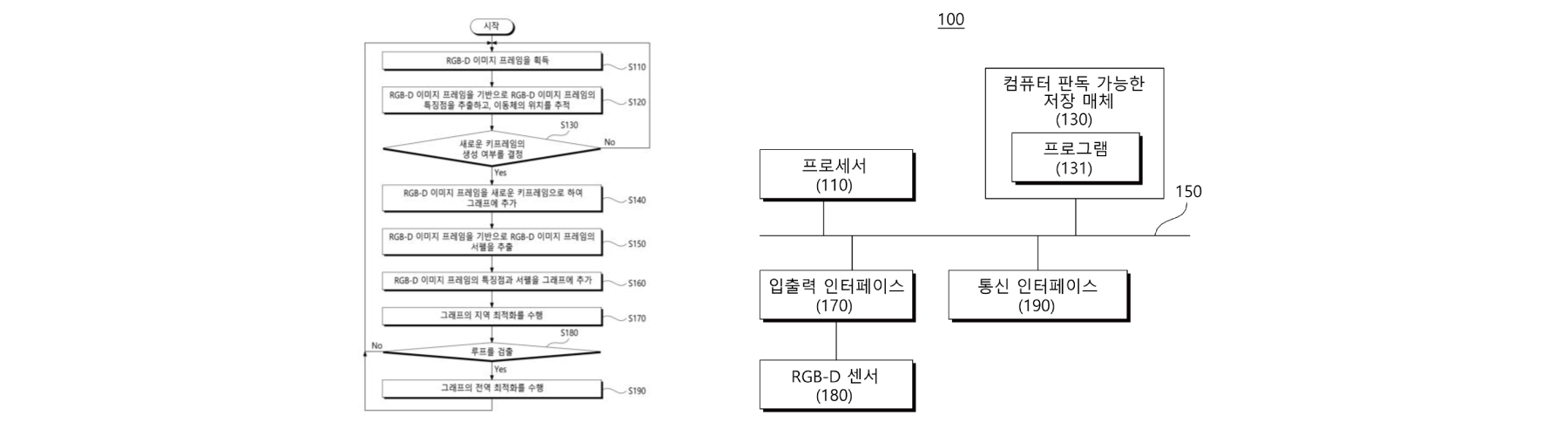
2) 처리 절차
1. 특징점 추출 및 위치 추적
- ORB 알고리즘 등을 이용해 이미지 내 특징점 식별 및 추적
2. 서펠 추출
- 수퍼픽셀을 기반으로 평면(서펠)을 추출 → 평탄 영역에서도 위치 인식 가능
3. 키프레임 생성 여부 판단
- 기존 특징점과 중복 비율이 낮으면 새로운 키프레임으로 추가
4. 그래프 구성 및 최적화
- 새롭게 추출된 특징점과 서펠로 구성
- 지역 최적화 → 루프 클로징 → 전역 최적화 수행
5. 최종 지도 작성
- 위치 정보 기반 SLAM 맵 생성
- 성능: 기존 ORB-SLAM2, ElasticFusion 등 대비 정확도 향상 (RMSE 기준)
시장성
1) 적용분야
- 실내외 자율주행 로봇 (예: 배달 로봇, 실내 청소 로봇)
- AR/VR 디바이스 위치 추적
- 드론 내비게이션
- 로봇 군집 제어 및 경로 최적화
- 디지털 트윈 기반 3D 공간 맵핑
2) SLAM 시장
글로벌 SLAM 시장 규모는 2023년 기준 4억 8,152만 달러에서 2031년 55억 7,253만 달러까지 연평균 35.8% 성장할 것으로 전망됨.
로봇, 증강현실, 자율주행차, 드론 등 다양한 분야에서 활용될 것으로 예상되며, 특히 로봇 분야에서 청소 로봇, 서빙 로봇, 산업용 로봇 등 다양한 분야에서 활용이 확대될 것으로 보임.
기술의 차별성
1) 기존 기술의 한계점
- 특징점 기반 SLAM은 평면, 단조로운 환경에서는 특징 추출이 어려워 정확도 저하
- 서펠 기반 SLAM은 특이 정보가 부족하거나 매칭 신뢰도가 낮아 불안정
2) 본 발명의 특장점
- 특징점과 서펠을 병렬적으로 융합하여 보완 관계 형성
- 패턴이 적은 환경에서도 위치 추정 가능
- 루프 클로징을 포함한 전역 최적화로 누적 오류 방지
- 기존 대비 RMSE 성능 향상 (표1, 표2에서 검증)
3) 차별화 포인트
- 특징점은 정점의 정밀성, 서펠은 면적의 안정성을 제공 → 복합 환경에서 위치 추정 강인성 확보
- 수퍼픽셀 기반 서펠 추출 방식 → 다양한 형태 및 해상도의 데이터에 적응 가능
- 그래프 기반 연산 구조 → SLAM 최적화에 유리