기술개요
본 기술은 이중 편파 안테나를 사용하는 GNSS 수신기 및 이를 활용한 정밀한 위치 판별 방법에 관한 것임.
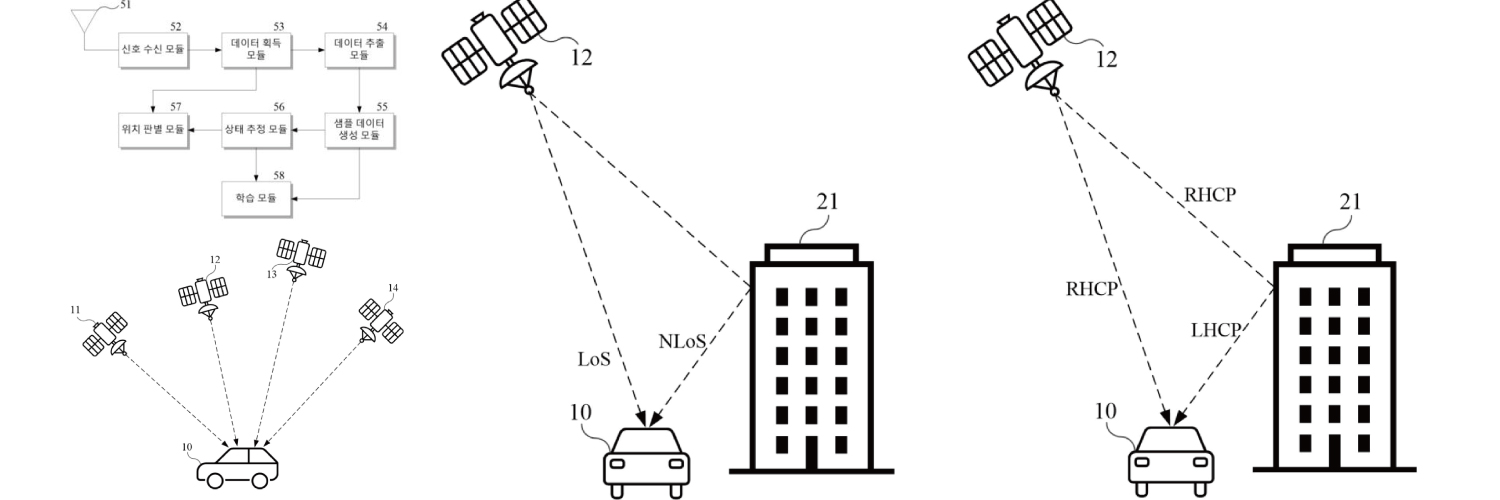
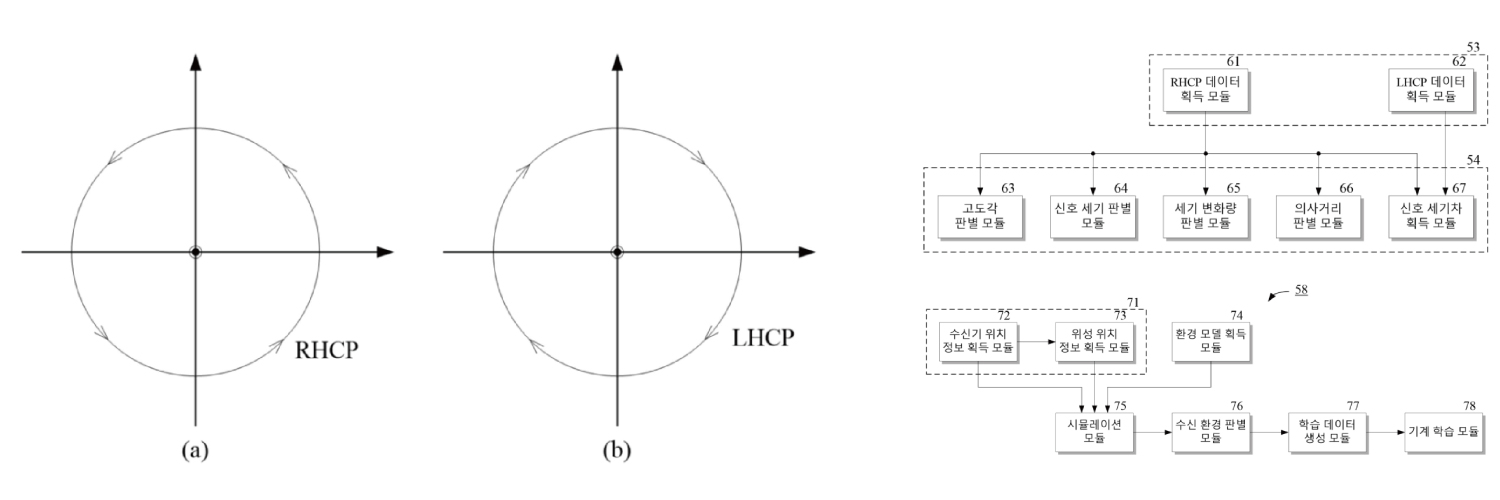
- 위성에서 수신된 GNSS 신호를 RHCP (우원편파)와 LHCP (좌원편파)로 구분하여 수신
- 수신된 신호의 상태를 기계 학습 기반 모델을 통해 분석
- 다중 경로 신호 (Multipath)의 영향을 최소화하여 정확한 위치 측정 가능
기술 구현 내용
1) 수신 모듈
- RHCP/LHCP 신호를 수신하는 이중편파 안테나
- 신호 강도(C/N0), 고도각, 신호 변화량 등을 측정
2) 데이터 획득 및 샘플 생성 모듈
- GNSS 데이터, 신호 강도, 의사거리 오차 등 다양한 환경 추정 데이터 수집
- 이를 기반으로 샘플 데이터를 생성
3) 상태 추정 모듈 (AI 모델)
- 지도 학습 기반의 기계 학습 알고리즘을 통해 신호 상태를 판단
- LoS / NLoS / 다중 경로 상태로 분류
4) 학습 모듈
- 레이 트레이싱 기반 시뮬레이션을 통해 대량 학습 데이터 생성
- 환경 모델(3D), 위성/수신기 위치 정보 기반
시장성
본 기술은 정밀 위치 기반 서비스(PNT) 시장에서 높은 시장성을 가지고 있음.
1) PNT 시장
글로벌 PNT 시장 규모는 2024년 기준 6억 6,500만 달러에서 73억 9,000만 달러까지 연평균 28.2% 성장할 것으로 전망됨.
- 무인이동체, 드론, 스마트 모빌리티 산업의 확대, 도심환경에서의 정확한 위치 판단 필요성 증가, 5G/6G 통신 인프라와 결합된 고정밀 위치 서비스 수요 증가 등 다양한 산업분야에 적목시켜 기존 시장은 지속적으로 성장하고 있음.
기술의 차별성
1) 기존 기술의 한계점
- 기존 GNSS 수신기는 단일 편파(RHCP)만 수신하며, NLoS 신호를 제대로 분리하지 못해 위치 오차 발생
- LoS/NLoS 판별은 단순히 C/N0 값 비교에 의존 → 정확도 낮음
2) 본 발명의 특장점
- 이중 편파 안테나를 통해 RHCP/LHCP를 모두 수신해 정보량 증가
- 기계 학습 기반 상태 추정 모듈로 신호 상태를 정밀하게 분류
- 레이 트레이싱 시뮬레이션을 통해 실제 환경 반영한 학습데이터 생성 가능
3) 차별화 포인트
- AI 기반 LoS/NLoS 신호 구분 + 고정밀 위치 추정 통합 시스템
- 도심 환경의 멀티패스 문제 해결 가능
- 다중 위성, 다양한 환경에서 확장 가능성 우수